Извините, ничего не найдено.
Не расстраивайся! Лучше выпей чайку!
|
|
|
|
|



 02.12.2013, 05:50
02.12.2013, 05:50
|
#1 |
|
.
Регистрация: 05.08.2006
Сообщений: 10,429
Написано 3,454 полезных сообщений (для 6,863 пользователей) |
[WIP] Smart Monitor Mount
Не игра, но 3д (в AutoCAD'е), "smart monitor mount" - хочу сделать руку для монитора, которая используя сервы и простенький софт а также API для управления рукой монитора.
У меня дома длинный стол, да и прийдёт скоро Tessel и Espruino, вот и решил сделать проект для изучения немного механики и совсем чучуть электроники. Минимум - управление каждым локтём и поворотом в 2 осях монитором. Далее: 1. установка "чёрных зон" - для предотвращения ударов монитора об стенки и полку рядом. 2. пресеты - простое переключение между сохранёнными позициями - для программирования вертикально повёрнут к углу, для работы на столе - горизонтально сверху повёрнут вправо. 3. слежка с камеры и определение оптимальной позиции. 4. вторая версия и их взаимодействие. Я рассчитываю хотя бы сделать минимум, то что "далее" - это мечты ") Вот думаю как сделать оптимальное вращение по X и Z оси. Y ось поддерживается локтём. X координата за счёт трёх логтей. Y координата - ещё не исследовал, но естественно будет что-то ездить вверх-вниз по столбу крепления. Есть простая "рука", думаю начать с прототипирования пластиком и сбора полной модели, затем рефакторить это дело и начать работать с металом. Благо есть hackspace, где все нужные инструменты есть в наличии. По схематике, дуга имеет на внешней стороне зубцы, окружность на боковом виде внизу - это шестерёнка с servo мотором, за счёт неё регулируется X ось. Окружность в центре синего паралеллипипеда - это ещё не начатая часть, где будет сквозное отверстие с двумя диогональными цилинрическими подшибниками и шестернёй кокруг, и второй на синей детали - контролируемой servo мотором. Таким образом мы имеем X и Z координаты. Я думал над дройной дугой, но не выходит что-то решение, либо слишком сложно получается. Это первые потуги что-то планировать, так что критика и помидоры - приветствуются. UPD1 (SolidWorks): UPD2 (Schema): UPD3 (Stand): Последний раз редактировалось moka, 30.12.2013 в 03:38. |
|
(Offline)
|

|


|
02.12.2013, 14:17
|
#4 |
|
.
Регистрация: 05.08.2006
Сообщений: 10,429
Написано 3,454 полезных сообщений (для 6,863 пользователей) |
Ответ: Кто какую игру делает? Скрины
|
|
(Offline)
|
|

|
28.12.2013, 00:27
|
#5 |
|
.
Регистрация: 05.08.2006
Сообщений: 10,429
Написано 3,454 полезных сообщений (для 6,863 пользователей) |
Ответ: Кто какую игру делает? Скрины
В продолжение предыдущему посту (не игровое).
Стадия концепций закончилась, и уже приступил к поиску конкретных деталей - болты, трубки, подшибники. Используя их спецификации разрабатываю пластиковые детали в SolidWorks. SolidWorks - реально крутая софтина, нужно конечно привыкнуть к основам, но там есть в нём самом туториалы удобные, базовые функции покажет - а далее эксперементируйте. Сборка девайсов из частей - прикольно сделана, то как нужно линковать части к друг-другу. В общем в планах сперва напечатать в 3D из пластика детали и собрать всё это дело, естественно некоторые детали по пути придётся не раз модифицировать. И затем пойдёт уже работа по металлу - но я пока так далеко не заглядываю. UPD: залил рендер тоже. UPD2: ещё один рендер. Последний раз редактировалось moka, 28.12.2013 в 09:34. |
|
(Offline)
|
|
| Эти 5 пользователя(ей) сказали Спасибо moka за это полезное сообщение: |
mauNgerS (28.12.2013), m_512 (28.12.2013), pax (28.12.2013), Samodelkin (28.12.2013), Taugeshtu (28.12.2013)
|
|
28.12.2013, 01:31
|
#6 | |
|
Мастер
Регистрация: 12.01.2009
Сообщений: 983
Написано 390 полезных сообщений (для 634 пользователей) |
Ответ: Кто какую игру делает? Скрины

|
|
|
(Offline)
|
|
| Сообщение было полезно следующим пользователям: |
moka (28.12.2013)
|
|
28.12.2013, 05:29
|
#7 | |
|
.
Регистрация: 05.08.2006
Сообщений: 10,429
Написано 3,454 полезных сообщений (для 6,863 пользователей) |
Ответ: Кто какую игру делает? Скрины
А остальные детали да - не так и просто. Как подметил - я много не думал над этим, но в hackspace london есть резец с тремя осями, и не мало других станков для работы по металлу. На крайняк есть отливка, и если качественную форму делать, то можно весьма точные детали отливать (требуют много полировки после). Либо обратиться в сервис и тебе сделают детали, конечно это стоит копеечку.. Сейчас в планах 3д печать мелких деталей, остальное - после. |
|
|
(Offline)
|
|
| Сообщение было полезно следующим пользователям: |
Samodelkin (28.12.2013)
|
|
28.12.2013, 11:01
|
#8 | |
|
Unity/C# кодер

Регистрация: 03.10.2005
Адрес: Россия, Рязань
Сообщений: 7,568
Написано 3,006 полезных сообщений (для 5,323 пользователей) |
Ответ: Кто какую игру делает? Скрины
|
|
|
(Offline)
|

|
| Сообщение было полезно следующим пользователям: |
Taugeshtu (28.12.2013)
|
|
28.12.2013, 19:07
|
#9 | |
|
Мастер
Регистрация: 12.01.2009
Сообщений: 983
Написано 390 полезных сообщений (для 634 пользователей) |
Ответ: Кто какую игру делает? Скрины
|
|
|
(Offline)
|
|
|
28.12.2013, 21:38
|
#10 | ||
|
.
Регистрация: 05.08.2006
Сообщений: 10,429
Написано 3,454 полезных сообщений (для 6,863 пользователей) |
Ответ: Кто какую игру делает? Скрины
Внешние детали имеют цилиндрическую форму отверстия, а внутренние включая цилиндр паралельный оси имеют полу-цилиндрическую форму. Таким образом имеется возможность управлять вращением без применения большой силы, единственная нагрузка - это энерция от веса монитора, при этом учитывая наличие подшибников, не будет торможения. Получается есть несколько вариантов - ставим металическую ось, и гайками немного сжимаем с двух сторон - будет у нас торможение. Хотим движение сервами - ставим серво снизу или сверху для вращения оси. Размер серва будет не столь важен т.к. располагается снаружи. Изначальная идея была распологать серво внутри самой кости, там где сейчас перегородка паралельная оси вращения, но ограничения в размере и последующая необходимость реостата в роли сенсора вращения - усложняет всё. Поэтому решение было вынести это наружу, и дать возможность модить и заменять эти части как угодно. Что делает эту сторону проекта модульной. На схеме ниже внизу слева показано.
Если вес будет слишком большой для средненького серва, то можно сделать две шестерёнки для конверсии нагрузки при разнице диаметров шестерёнок (как в велосипедных скоростях, хз как механический термин называется). На счёт функционала движения, хочется сделать чтобы рука могла перемещаться в стороны, на схеме показано снизу справа. Но также иметь возможность приближаться к стене и отдаляться, т.к. положение руки на столе который в среднем 60 - 100 см в глубину, не должно иметь значение. В данный момент я не продумал вертикального крепления, идеи есть, но нету конкретного решения. Я хочу избежать фиксированной оси на вертикальном держателе самой руки, и сделать возможность вращения там тоже. Если это будет реализовано без сильного геморроя, тогда дистанция при перпендикулярном приближении монитора к самому держателю, сможет быть около 25см - что очень даже удовлетворяет даже 60см глубины столы. Задача иметь как можно обширную свободу перемещения монитора. На счёт point-of-failure - полностью согласен. Продумываю сперва только механику, без зависимости на электронике. Чтобы именно электроника не была шансом поломки, даже при выходе из строя всей электроники, рука должна иметь возможность манипулирования по всем осям вручную без проблем. Это первый опыт постройки чего-либо подобного. Спасибо за критику и вопросы! Это реально мотивирует больше думать о разных аспектах. |
||
|
(Offline)
|
|
| Эти 2 пользователя(ей) сказали Спасибо moka за это полезное сообщение: |
Samodelkin (29.12.2013), St_AnGer (19.01.2014)
|
|
29.12.2013, 02:20
|
#11 |
|
.
Регистрация: 05.08.2006
Сообщений: 10,429
Написано 3,454 полезных сообщений (для 6,863 пользователей) |
Ответ: [WIP] Smart Monitor Mount
В процессе исследования вариантов реализации вертикальной рельсы с системой подъёма и поворота.
LMF - Linear Bushing Вот этот приятель одевается на вертикальную трубку, и ездит без сильной нагрузки. Также удерживает перпендикуляр. Два таких приятеля (один снизу, другой сверху вверх ногами), могут отлично держать перпендикуляр и свободно ездить по трубке. Также есть ещё посложнее и подороже решения SLF например, но они реально дороже.  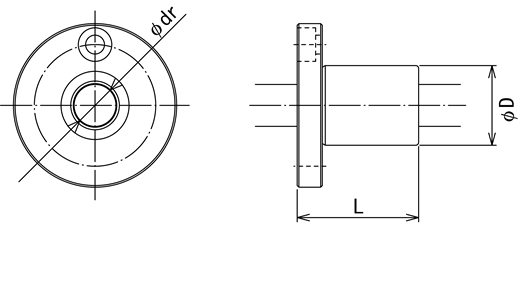 Предположим трубка 30мм, и у нас есть вертикальное передвижение. Нужна система подъёма тяжёлого веса - до 20кг. Для этого можно использовать Lead Screw и Screw Nut подобные этим:  Далее есть два варианта, либо ставится мотор снизу и вращаем сам "болт", либо ставим шестерёнку и вращаем "гайку". Во втором варианте плюс - в том что за вращение гайки отвечает сама рука, а болт будет зафиксирован более крепко. Тем самым мы можем иметь несколько рук на одном болту. Обычно "болт" ставится по середине и по бокам рельсы, но т.к. у нас большой вес и нагрузка в сторону - мы вынесем всю нагрузку на центральную рельсу, а сам болт будет позади неё. Таким образом можно будет сделать 180 градусов вращение вокруг оси центральной рельсы на платформе где будет крепиться рука. Данная часть к сожалению будет зависеть на механики шестерёнок вращения болта. При выходе из строя, сама гайка вращаться не будет (если болт не имеет очень высокий градус резьбы и не смазан). Получается при отсутствии электроники - рука просто будет фиксирована вдоль рельсы. А при наличии - она будет ездить вверх-вниз. За счёт использования болта и гайки, нам не нужно супер сильных нагрузок для подъёма платформы - возможно средненький моторчик и пару шестерёнок для конверсии вращения с мелких на большие. Мотор будет располагаться на начале руки (подъёмной части). |
|
(Offline)
|
|
| Сообщение было полезно следующим пользователям: |
Samodelkin (29.12.2013)
|
|
30.12.2013, 00:53
|
#12 |
|
.
Регистрация: 05.08.2006
Сообщений: 10,429
Написано 3,454 полезных сообщений (для 6,863 пользователей) |
Ответ: [WIP] Smart Monitor Mount
Столб 30мм диаметром, шестерёнка с подшипником на "болту". Второй - вид снизу.
И вид под столом (угу, нужно будет 1 большое отверстие для столба, и 4 для болтиков сквозь столешницу). |
|
(Offline)
|
|
| Сообщение было полезно следующим пользователям: |
Samodelkin (30.12.2013)
|
|
30.12.2013, 02:39
|
#13 |
|
Мастер
Регистрация: 12.01.2009
Сообщений: 983
Написано 390 полезных сообщений (для 634 пользователей) |
Ответ: [WIP] Smart Monitor Mount
Прям клокворкпанк
 Главное чтоб сидящих за таким столом шестернями не захавало... |
|
(Offline)
|
|
|
31.12.2013, 04:11
|
#14 | ||
|
.
Регистрация: 05.08.2006
Сообщений: 10,429
Написано 3,454 полезных сообщений (для 6,863 пользователей) |
Ответ: [WIP] Smart Monitor Mount
Вынес оффтоп о Clockwork Punk'е сюда: http://forum.boolean.name/showthread.php?t=18823
И ответил на данный пост:
Да и мне очень важно знать что тебе "не интересно". 1. Много читать: * болтики * шурупчики * около 10ти типов подшипников простого типа * около 30ти для линейного движения * моторы и различия (хотя бы 20 разных типов, и почему "тот а не этот") * сенсоры вращения * сенсоры измерения дистанции * 3д принтеры * а тут чтивы на недели, всё очень не организовано * типы пластиков * открыть для себя разницу между Imperial и Metrical систем измерений * найти поставщиков конкретных деталей и установить с ними контакт 2. Далее начнётся лишь часть по созданию виртуального плана, и это большая часть где кстати большинство интузиастов загибаются, т.к. не осознают объём работы который предстоит сделать. То что у меня уже есть, заняло примерно 70 часов, я новичёк тут, но подумай, 70 часов для человека с постоянной работой и девушкой, это при самых идеальных обстоятельствах не более 2ух часов в день, это выходит около месяца в идеальных обстоятельствах, естественно ещё работы примерно 80% по чертежам. Следственно закончу первые версии и приступлю к печати ещё не скоро. 3. Нужен кит, а именно: * свой или доступ к удалённому 3D принтеру. Тут если свой, то пройдёт как минимум месяц до того как ты на нём что-то напечатаешь дельное. Это я говорю о готовых - собранных для тебя принтеров. Те что нужно собирать самому уходит около 2-4 недель на сборку, и около недели на калибровку. * много инструмента, паяльник, всякие щипцы по обработки 3д принтов, резка, пилки для металла, насадки для дрели, тестинг электроники. 4. Электроника - тут даже не тронутая тема, всё это дело должно управляться чем-то - микроконтроллер. У меня будут два типа в конце января: Tessel, это JS + Node.js микроконтроллер, с возможностью подключения много всякого железа к нему, ну и естественно приятный node. И несколько espruino платок, также JS но никаких супер сложностей - более похоже на Arduino. Я не работал с этим никогда также, следственно это всё нужно будет изучить как поверхностно так и в деталях научиться управлять конкретными девайсами и взаимодействия с сенсорами. Это отдельная ветвь проекта, в которой можно на несколько лет потеряться (что собственно со многими кто втягивается в тему и просиходит). 5. Покупка частей - тут же нужно будет купить много частей и это обычно занимает недели, т.к. доставка некоторых будет из US, т.к. как оказывается - у них это всё отлично доступно, а где либо не в US, купить какой-то специфичный болтик или подшипник - хер вам. Доставка из US через посредника может занять около месяца и более. 6. Принтинг. А тут сам факт принтинга и работа с 3д принтером требует опыта и знаний, не один кг ABS или PLA пластика будет выброшен пока что-то дельное будет напечатано. Детали будут не сходиться, и многое будет "не по плану", т.к. теория и модель в SolidWorks - одно, а практика другое. Поэтому тут у нас уйдёт и не один месяц на всё про всё, пока я дельную механику соберу. 7. Электроника, нужно будет это дело "оживить" и тут опять, заказывать серво моторчики, степп моторы, потентометры, решить ещё не решённые задачи (линейный сенсор например), и это дело всё продизайнить и спаять. 8. Софт - чем это оперируется. Я даже оптимистично не смотрю на всё это, реально менее чем за 5 месяцев, тем более с моим "пристрастием" задерживаться на своей работе. Да и к информации: "Реализовывать" - это не отметка во времени когда "бац" и готово, это процесс. И всё что бы не делалось, заключается именно в процессе а не результате. Как и данный проект - для меня важен процесс а не результат, и опыт от процесса. Так что Arton, не торопись, забудь и можешь не посещать данную тему, с весьма "ценными комментами" и оффтопом, ОК? |
||
|
(Offline)
|
|
|
31.12.2013, 11:29
|
#15 |
|
Ференька

Регистрация: 26.01.2007
Адрес: улица Пушкина дом Колотушкина
Сообщений: 10,743
Написано 5,461 полезных сообщений (для 15,676 пользователей) |
Ответ: [WIP] Smart Monitor Mount
Мока, ты планируешь производить и продавать девайс? Или сделать только в 1 экземпляре для себя?
__________________
|
|
(Offline)
|
|




